
В 1920 году чешский писатель Карел Чапек придумал название для механизма, изобретенного для выполнения работы вместо человека — “робот”. Определение со временем прижилось и с конца XX столетия стало обозначать систему узлов, датчиков и механизмов, предназначенную для выполнения набора операций в соответствии с заложенной программой.
Прогресс науки и техники позволил инженерам-конструкторам создавать все более совершенные машины, способные заменить человека в экстремальных условиях: в космосе, под водой, на поле боя. Робот не знает усталости, способен выполнять без ошибок точнейшие движения — именно поэтому роботизированные механизмы постепенно вытесняют человеческий труд на производстве.
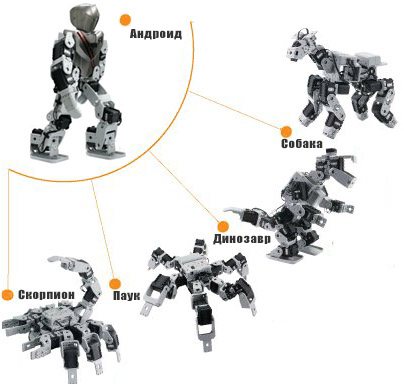
(Типы роботов)
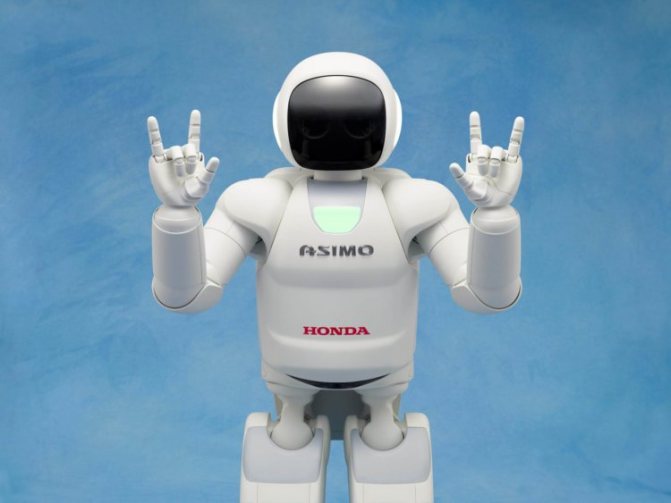
Существуют десятки основных типов роботов, которые отличаются по нескольким параметрам — от назначения до внешнего вида. Для того, чтобы понять, как работает робот, рассмотрим его вид, наиболее приближенный к облику человека — робот-андроид.
Конструкция андроида
Человекоподобный робот состоит из нескольких основных частей:
- Голова — верхняя часть конструкции;
- Торс — основной каркас робота;
- Руки-манипуляторы с силовыми механизмами;
- Ноги-шагоход из двух нижних конечностей, если шасси, то гусеничного привода.
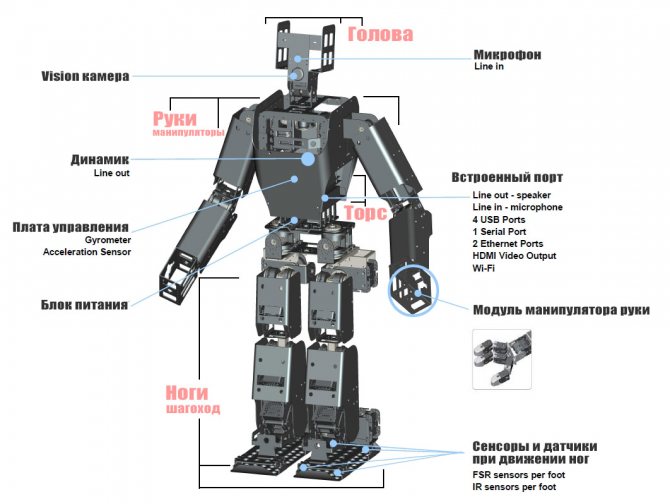
(Наглядная конструкция робота)
Вопреки распространенному мнению, что в голове андроида, как у живого человека, находится “мозг”, т.е. компьютер или центральный процессор, чаще всего в верхней части механизма располагаются другие элементы системы: видеокамеры, датчики, гироскоп. Это обусловлено сравнительно небольшими размерами “головы”, внутреннее пространство которой не способно вместить большой объем электроники.
Торс — наиболее защищенная часть робота. Во внутреннем пространстве каркаса размещают электронику, управляющую системой, автономный источник питания (аккумулятор).
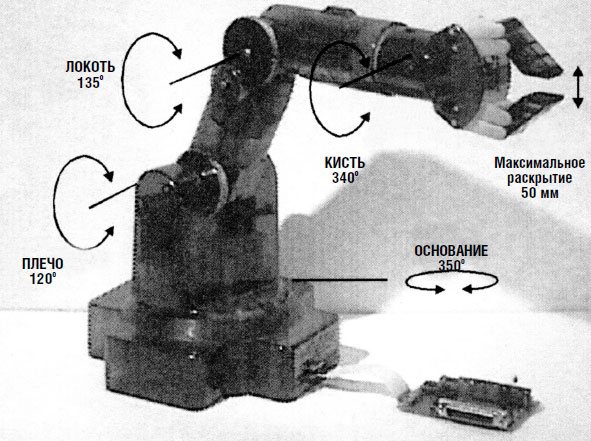
(Классическая рука-манипулятор)
Захват/перемещение груза, выполнение других операций, включая действия с инструментом — задачи для верхних конечностей — манипуляторов. Кистевые окончания могут иметь форму и функцию кистей человека.
Роботы-андроиды передвигаются шагами на двух “ногах”. Шасси копирует антропологические особенности строения человеческого тела: ноги состоят из нескольких составных частей, соединенных суставами-шарнирами. Отдельные модели роботов способны бегать, т.е. перемещаться таким образом, что обе ноги в момент движения не касаются поверхности.
Голова
Для распознавания окружающей обстановки — предметов, особенностей ландшафта — роботизированные комплексы оснащают видеокамерами (рисунок 1) с высоким разрешением. Их обычно размещают в голове андроида. Благодаря камере (или нескольким камерам) машина может идентифицировать (распознать) окружающие объекты, оценить их размер и расстояние до предметов.
В зависимости от ландшафта или особенностей архитектуры здания робот способен принять решение о способе передвижения и смещении центра тяжести, например, при подъеме/спуске по ступеням или наклонным поверхностям, преодолении рва или препятствия.
(Рисунок 1. Глаз-видеокамера слежения робота)
Видеокамеры оснащают несколькими модулями для получения дополнительной информации:
- В инфракрасном диапазоне;
- В режиме тепловизора.
Кроме камер, конструкция роботов предусматривает использование системы датчиков, которые определяют пространственное положение андроида на местности или в помещении, силу сжатия манипуляторов, скорость перемещения и т.п. Наиболее важный датчик для андроида — гироскоп, именно он сохраняет устойчивое вертикальное положение машины во время движения. Именно таким устройством оснащен робот-андроид Atlas, детище американской компании Boston Dynamics. От датчиков и камер информация поступает в “мозг” машины — компьютер или систему компьютеров.
Торс
В самой защищенной и просторной части робота устанавливают электронные платы системы управления и автономные источники питания.
Во время выполнения миссии роботом управляет компьютер — набор микросхем, предназначенный для получения, накопления информации, ее обработки и отправления сигналов к исполняющим механизмам, работающих при помощи двигателей (рисунок 2). Прогресс компьютерной техники позволяет устанавливать в андроиды все более совершенные системы анализа, способные использовать несколько наиболее продвинутых технологий:
- Распознавание объектов;
- Распознавание речи;
- Распознавание движений, жестов;
- Самообучение на основании получаемой информации;
- Запоминание внешнего вида объектов, лиц людей.
Поставить задачу перед андроидом можно программным способом, т.е. путем внесения перечня команд в ЦПУ, либо вербально, произнеся набор слов для начала выполнения задачи. Отдельные модели андроидов способны реагировать на жесты рук, изменение местоположения человека.
Система управления роботом очень напоминает построение нервной системы человека в зависимости от его развития:
- Прямое выполнение конкретных команд оператора;
- Необходимость постоянной корректировки действий андроида при выполнении общей задачи;
- Ввод конечной цели (указание направления действий).
В первом случае в памяти машины записаны команды, которые ЦПУ (центральный процессор) подает к исполнительным механизмам для выполнения определенных операций. Например, перемещение робота, изменение положения манипулятора и т.п. по команде оператора. Одна из самых дешевых и простых в изготовлении моделей.
При передвижении андроида из точки А к точке Б вмешательство оператора необходимо в случаях, когда набор алгоритмов (заранее записанных в память действий) не предусматривает преодоление сложных препятствий (к примеру).
Более продвинутый интеллект, получив информацию от системы датчиков, видеокамер, самостоятельно оценивает обстановку и выбирает наиболее оптимальное решение самостоятельно.

(Рисунок 2. Двигатель постоянного тока)
Основным источником энергии для современных роботов-андроидов является электричество. Источник питания может быть:
- Автономным — аккумуляторы, солнечные батареи;
- Внешним — электроэнергия подается по кабелю.
В первом случае машина не привязана к энергоресурсу, способна выполнять задачи на любом удалении от зарядной станции. Из недостатков — увеличенный вес робота, малое время работы. Кабельное снабжение электроэнергией имеет свои плюсы: меньший вес андроида, возможность использования большего числа узлов, датчиков, механизмов, неограниченное время работы.
2.1. Компоненты базового набора
В набор входят [https://education.lego.com/ru-ru/lego-education-product-database/mindstorms-ev3]:
- Микрокомпьютер EV3.
Спецификации микрокомпьютера EV3:
- процессор типа ARM 9 с Linux-образной операционной системой
- 4 порта ввода информации с частотой работы до 1 кГц
- 4 порта вывода для выполнения команд
- встроенная память, включающая 16 МБ флеш-памяти и 64 МБ оперативной памяти
- слот для чтения карт памяти формата Mini SDHC с поддержкой чтения карт объемом до 32 ГБ
- шестикнопочный интерфейс управления с функцией изменения подсветки (3 цвета) для индикации режима работы микрокомпьютера
- монохромный дисплей с разрешением 178 x 128 пикселей позволит осуществлять детальный просмотр графиков и чтение данных с датчиков
- высококачественный встроенный динамик
- возможность программирования и регистрации данных с помощью микрокомпьютера, созданные программы и полученные данные могут быть экспортированы в программное обеспечение EV3
- поддержка связи с компьютерами через встроенный порт USB или подключаемые приемники WiFi или Bluetooth
- режим USB 2.0 хостинга, позволяющий соединять микрокомпьютеры в последовательную цепь
- поддержка WiFi и поддержка подключения USB флеш-карт
- питание от 6 батарей типа АА или от аккумуляторной батареи постоянного тока EV3 емкостью 2050 мАч
- Аккумулятор EV3.
Литий-ионная аккумуляторная батарея постоянного тока EV3 имеет емкость 2050 мАч и специально созданная для работы с новыми микрокомпьютерами EV3
- Два больших серво мотора.
- встроенный датчик вращения с точностью измерений до 1 град
- максимальные обороты до 160-170 об/мин
- максимальный крутящий момент в 40 Нсм
- автоматическая идентификация программным обеспечением EV3
- Средний серво мотор.
- встроенный датчик вращения с точностью измерений до 1 град
- максимальные обороты до 240-250 об/мин
- максимальный крутящий момент в 12 Нсм
- автоматическая идентификация программным обеспечением EV3
- Ультразвуковой датчик.
- измеряет расстояния в пределах от 1 до 250 см
- точность измерений составляет +/- 1 см
- в режиме прослушивания внешний светодиод постоянно мигает, в режиме излучения светодиод постоянно горит
- если ультразвуковой сигнал распознан, датчик возвращает логическое значение «Истина»
- автоматическая идентификация программным обеспечением EV3
- Датчик цвета.
- измеряет отраженный красный свет и внешнее рассеянное освещение, от полной темноты до яркого солнечного света
- фиксирует и определяет 8 цветов
- частота опроса до 1 кГц
- автоматическая идентификация программным обеспечением EV3
- Гироскопический датчик.
- режим измерения углов с точностью до +/- 3 градуса
- встроенный гироскоп улавливает вращения с моментом до 440 град/с
- частота опроса до 1 кГц
- автоматическая идентификация программным обеспечением EV3
- Два датчика касания.
- встроенная фронтовая кнопка
- автоматическая идентификация программным обеспечением EV3
- Сборочные элементы LEGO Technic (541 деталь) и два пластиковых лотка – органайзера для хранения и сортировки деталей.

Руки-манипуляторы
Манипуляторы копируют структуру рук человека (рисунок 3) и состоят из нескольких частей, соединенных шарнирами:
- Кистевого;
- Предплечья;
- Плечевого.
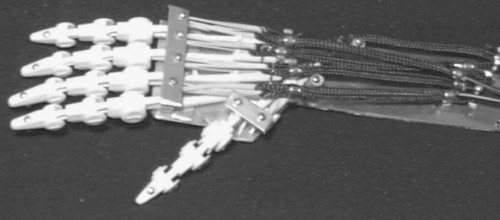
(Рисунок 3. Рука-манипулятор)
Манипуляторы имею несколько степеней свободы, т.е. робот может поднять руки, развести их в стороны, вращать кисти, производить захват предметов «пальцами». Манипуляторы приводятся в действие силовыми механизмами — сервоприводами. Часто для аккуратной и точной работы пальцы оснащают специальными датчиками, которые регулирую силу сжатия. Вместо грузозахватных приспособлений в кистевые отделы манипуляторов устанавливают другие приборы и механизмы: сварочные аппараты и т.д.
Ноги-шагоход
По аналогии со строением тела человека роботы-андроиды передвигаются шагами. Конструкция ног предусматривает возможность передвигаться бегом, преодолевать различные препятствия (лестницы, ямы, наклонные поверхности). Ноги, как и руки-манипуляторы, приводятся в действие двигателями (рисунок 4).
(Рисунок 4. Шаговой двигатель)
Для всех типов роботов используют несколько типов исполнительных механизмов:
- Механические;
- Электрические;
- Гидравлические;
- Пневматические;
- Гибриды (электромеханические, гидромеханические и т.д.).
Из-за особенностей конструкции роботов-андроидов (небольшие габариты, система шасси — шагоход) для механизации узлов наиболее часто используют сервоприводы или сервомоторы (рисунок 5), основу которых составляет электрический двигатель.
(Рисунок 5. Сервомотор)
В отличие от обычного электромотора, комплектный сервопривод способен:
- С высокой точностью определять и изменять угол положения вала;
- Потреблять ровно столько электроэнергии, сколько необходимо для выполнения определенного действия;
- Снижать нагрузку на детали робота, увеличивая их ресурс.
VGo — роботизированное устройство телеприсутствия
VGo попало в этот список не только из-за футуристического вида или особых достижений в области технологий, но и за особую изобретательность. Когда VGo размещается в классной комнате, лекционном зале или где-нибудь еще, пользователь может получить к нему полный контроль с помощью ноутбука через Wi-Fi.
Технологии этого робота позволяют не только говорить, видеть и слышать, но и передвигаться. Это куда любопытнее, чем простой звонок в Skype, когда человек должен сидеть лицом к ноутбуку. Удаленный пользователь просто поворачивает робота в любом направлении, что позволяет полное взаимодействие. Вы можете быть в двух местах одновременно. Этот слиток технологий имеет жизненно важное значение для многих групп людей.
Ребенок-инвалид может посещать школу, не выходя из дома. Можно увидеть и поговорить с членом своей семьи за многие километры, буквально находясь с ним рядом. Также это помогает обеспечить переводчика в режиме реального времени.
Тот факт, что VGo относительно дешев (6000 долларов), делает его доступным для школ и больниц за рубежом.

Работа-действие робота
Пример работы всех систем робота-андроида в связке
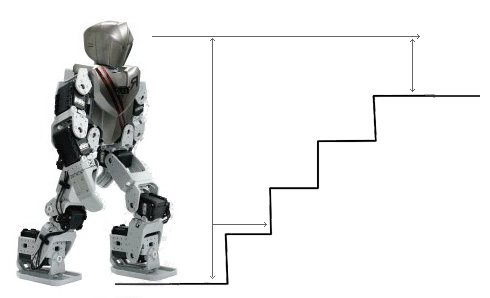
- Тип робота: андроид
- Способ управления: автономный
- Задача: преодолеть лестничный пролет
- После включения питания загружается ЦПУ, которая проводит проверку всех систем.
- После получения подтверждения об исправности машины компьютер стабилизирует вертикальное положение андроида при помощи гироскопа, оценивает препятствие камерами.
- Установив дальность до первой ступени и ее высоту, расстояние до других близко расположенных объектов, робот начинает движение.
- Сервоприводы приводят в действие нижние конечности, которые поднимают опорные площадки (стопы) на нужную высоту.
- Равновесие машины поддерживает гироскоп.
- После преодоления последней ступени робот останавливается либо продолжает движение вперед в зависимости от программы или полученной команды.
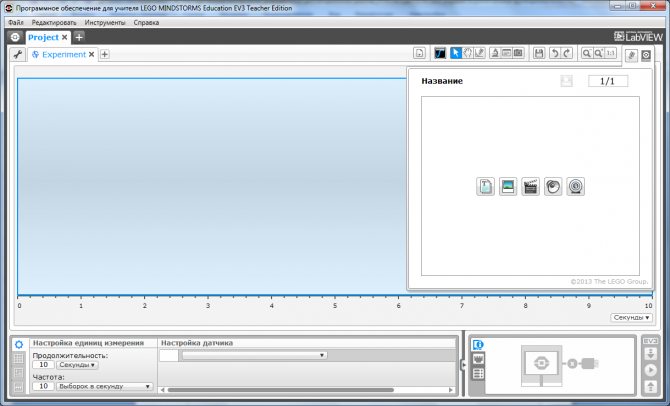
2.2. Система программирования LEGO MINDSTORMS Education EV3
Система программирования LEGO MINDSTORMS Education EV3 поставляется по лицензии либо на 1 персональный компьютер, либо для класса ПК (групповая лицензия). Групповая лицензия позволяет инсталлировать и использовать программное обеспечение EV3 на всех компьютерах, находящихся по адресу организации-покупателя.
Система программирования LEGO MINDSTORMS Education EV3 основана на программном пакете National Instruments LabVIEW и имеет понятный графический интерфейс. Пользователь формирует программу, перетаскивая иконки, отвечающие за те или иные функции робота.
Функционал регистрации данных, включенный в систему программирования, является мощным инструментом для проведения различной экспериментальной работы. С помощью него можно собирать, анализировать и использовать данные, поступающие с датчиков. Ученики также могут строить интерактивные графики, используя полученные данные.
Встроенный редактор контента позволяет учителям модифицировать имеющиеся учебные курсы и создавать свои собственные. Кроме того, редактор позволяет ученикам фиксировать свои успехи с помощью создания и заполнения электронных тетрадей, которые также являются частью программного окружения EV3. Эта функция упрощает процесс проверки успеваемости и контроля знаний.
Программное обеспечение EV3 поставляется со специальным инструментом по обучению Robot Educator, включающим 48 пошаговых мультимедийных обучающих урока, созданных для помощи ученикам и преподавателям в обучении основам робототехники. Эти уроки также обучают использованию функционала регистрации данных и поясняют свойства аппаратного обеспечения EV3.
После запуска программного обеспечения LEGO MINDSTORMS Education EV3 открывается основное окно программы (лобби).
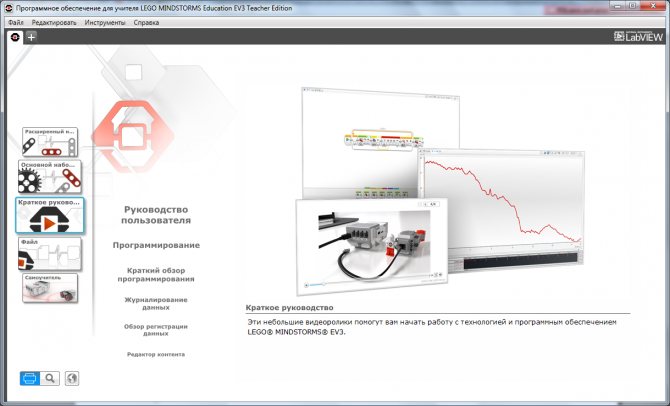
Это окно содержит меню, позволяющие работать:
- с основным и расширенным набором компонентов (описание наборов и инструкции по сборке моделей);
- кратким руководством пользователя (теория и базовые примеры программирования);
- проектом;
- самоучителем.
Основным для работы с моделью является окно проекта. Проект может содержать программы управления роботом. В этом случае открывается окно, показанное ниже:

Кроме этого, проект может подразумевать проведение эксперимента по обработке данных. Тогда открывается следующее окно: